

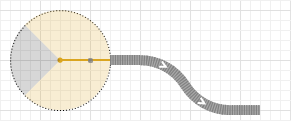
 Jib crane in graphical editor Jib crane in graphical editor
|
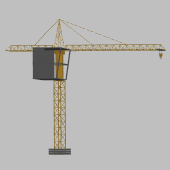
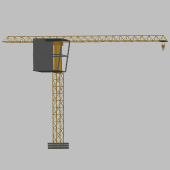
 Jib crane at model runtime in 3D animation Jib crane at model runtime in 3D animation
|
Jib crane is the space markup element that graphically defines a tower crane. You can use Material Handling Library block MoveByCrane to simulate how the crane transports agents (material items) between two points of simulated environment.
Jib crane has two different modes of operation depending on how its components move in relation to each other.
The maximum height an agent (material item) can reach when raised by jib crane equals the height of the crane itself.
Jib crane can serve as an obstacle on the way of pedestrians and transporters moving in free space navigation mode.
Jib crane element provides users with a set of actions, which are used to define additional agent behavior.
To draw a crane
-
Drag the
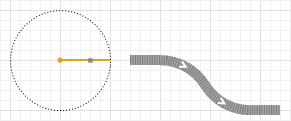
 Jib Crane element from the Material Handling section of the
Jib Crane element from the Material Handling section of the  Space Markup palette into the graphical editor. You will see the circle shape with the single horizontal shape of crane’s jib.
Space Markup palette into the graphical editor. You will see the circle shape with the single horizontal shape of crane’s jib.
-
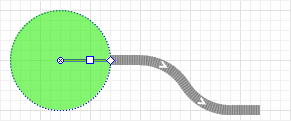
Crane can pick up or drop off material items directly from or to a path, a conveyor, and a railway track. In this case you should connect the crane to the corresponding space markup element by placing it close enough so that the crane shape is highlighted in green (it means the connection has been established).
-
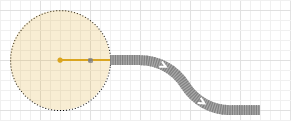
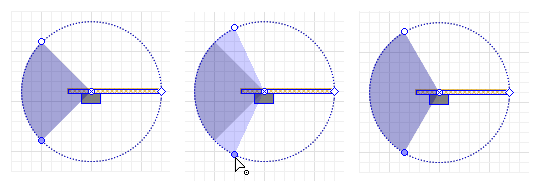
After crane has been successfully connected, the crane shape will be filled with color as displayed in the image below.
- You can adjust the initial angle of the jib and its length.
-
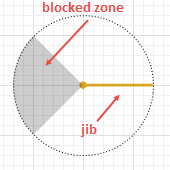
You can set up a sector in the crane’s rotational periphery where the jib cannot move. To enable this feature for the crane, select Blocked zone option in Properties view. Blocked zone can be adjusted from the graphical editor.
- The default placement of the crane’s blocked zone is always as displayed in the image above. If you place the jib in this area before enabling the blocked zone, the movement of the crane during the model run will be impossible and an error will occur.
- To customize the crane’s appearance, select the type of crane in Properties view: either Industrial jib crane, Cat-head tower crane or Flat-top tower crane. You can change Crane color in Properties view for all the types and Cabin color for the last two.
- General
-
Name — The name of the jib crane. The name is used to identify and access the crane from code and Material Handling Library blocks.
Ignore — If selected, the jib crane is excluded from the model.
Visible on upper agent — If selected, the jib crane is also visible on the upper agent where this agent lives.
Lock — If selected, the crane’s shape is locked. Locked shapes do not react to mouse clicks — it is impossible to select them in the graphical editor until you unlock them. It is frequently needed when you want to prevent editing this shape while drawing other shapes over it.
Visible — Here you specify whether the shape is visible on animation at model runtime, or not. Using the control, choose yes or no.
Material item type — The type of the material item that is transported by this jib crane.
Is obstacle — If selected, this jib crane will be considered an obstacle for pedestrians and transporters moving in free space mode.
Component movement mode — Here you can choose how the crane’s jib, trolley, and hook should move in relation to each other. The options are:
- Step-by-step — the components will move one at a time. This mode satisfies the safety conditions of operating a crane.
- Concurrent — the movement of all components will be executed at the same time. This mode is considerably faster than Step-by-step mode, but not as safe.
Trolley speed — Here you can specify the crane’s trolley moving speed. The property is dynamic, therefore you can set up the speed change on runtime depending on whether the crane is loaded or not. Using the local isLoaded variable of boolean type, you can, for example, set up the speed change with the conditional operator: isLoaded ? agent.mySpeed : 1. When the crane is unloaded, the agent variable is null. If you haven’t specified any particular speed value for the unloaded crane, the trolley will move with the default speed of 0.5 meters per second.
Lifting speed — Here you can define the hoist lifting speed. The property is dynamic, therefore you can set up the speed change on runtime depending on whether the crane is loaded or not. Using the local isLoaded variable of boolean type, you can, for example, set up the speed change with the conditional operator: isLoaded ? agent.mySpeed : 1. When the crane is unloaded, the agent variable is null. If you haven’t specified any particular speed value for the unloaded crane, the hoist will move with the default speed of 0.1 meters per second.
Jib rotation speed — Here you can define the rotation speed of the crane’s jib. The property is dynamic, therefore you can set up the speed change on runtime depending on whether the crane is loaded or not. Using the local isLoaded variable of boolean type, you can, for example, set up the speed change with the conditional operator: isLoaded ? agent.mySpeed : 1. When the crane is unloaded, the agent variable is null. If you haven’t specified any particular speed value for the unloaded crane, the jib will rotate with the default speed of 0.5 rotations per minute.
- Actions
-
In all the actions, the current material item is accessible as the local variable agent.
On failed — Here you can type Java code that will be executed in case of jib crane failure.
On repaired — Here you can type Java code that will be executed when the jib crane is repaired.
On loading — Here you can type Java code that will be executed directly after the jib crane takes hold of the material item.
On unloading — Here you can type Java code that will be executed directly after the jib crane releases the material item.
- Appearance
-
Type — Here you can choose the type of crane: either Industrial jib crane, Cat-head tower crane or Flat-top tower crane.
Industrial jib crane
 Cat-head tower crane
Cat-head tower crane
 Flat-top tower crane
You only change the visual appearance of your crane: your choice doesn’t affect the logic of its operation.
Flat-top tower crane
You only change the visual appearance of your crane: your choice doesn’t affect the logic of its operation.Cabin color — [Visible if Style option is set to either Cat-head tower crane or Flat-top tower crane] Crane cabin’s fill color. Choose No color, if you do not want the area to be filled.
Crane color — Crane shape’s color. Choose No color, if you do not want the area to be filled.
- Maintenance, failures, breaks
-
Downtime block(s) — Select here Downtime blocks that will cause this markup element to enter the downtime state.
During the downtime, the element stops working and stops executing new tasks, unless a task has a sufficient priority to override the downtime tasks. Even if the element has acceleration or deceleration settings, it still stops immediately when it enters downtime.
During a transition to downtime the element moves from the current state to one of the following states: MAINTENANCE, FAILED, CUSTOM_DOWNTIME depending on the type of downtime specified in the Type property of the Downtime block. If the equipment is configured to move to the service point when the downtime occurs, it is in the corresponding downtime state during this movement as well.
If the crane is busy loading or unloading when the downtime happens, the current loading/unloading operation is terminated, and it will be restarted after the downtime ends.The crane transporter tasks can have an individual priority, which affects the queuing of the downtime task:- If a material item transported by the crane has a higher priority than the downtime tasks, it will be transported before downtime starts. If there are multiple such items, the downtime won’t start until all of them are transported.
- If the downtime task has a higher priority but cannot preempt other tasks (the May preempt other tasks option of the Downtime block is not selected), the crane will first finish its current task and then proceed to the downtime according to its priority.
- Downtime tasks with a higher priority and the May preempt other tasks option checked in the Downtime block will interrupt the crane’s current transport task.
If the After release, hook returns to initial position if no other task option is used, a downtime task of any priority will interrupt the return to home position command.
A bridge of a multi-bridge crane that is in the downtime state also cannot be moved by other bridges or by the moveTo() command. If new agents, according to their priority policies, cannot seize a crane that is in the downtime state, they wait for it to come out of the downtime state in the logical queue. - Position and size
-
Level — Level to which this element belongs.
X — X-coordinate of the point where the crane is located.
Y — Y-coordinate of the point where the crane is located.
Z — Z-coordinate of the point where the crane is located.
Jib length — Here you can specify the crane’s jib length.
Crane height — Here you can specify the height of the jib crane itself.
Initial jib angle — Here you can specify the initial angle of the crane’s jib in either positive or negative degrees or radians. A graphical tip located to the right of the control element displays the specified angle.
Trolley position — Here you can specify the initial position of the crane’s trolley.
Blocked zone — If selected, this option allows you to define a sector in the crane’s rotational periphery where the jib will not be able to enter.
Zone start angle — [Visible if Blocked zone is selected] Here you can specify the angle where the blocked zone will start. A graphical tip located to the right of the control element displays the specified angle.
Zone angle, ° — [Visible if Blocked zone is selected] Here you will specify the sector of the blocked zone itself. It will be calculated starting from.
- Advanced
-
Show in — Here you can choose whether you want the shape to be shown both in 2D and 3D animation, or in 2D only, or in 3D only.
Show name — If selected, the shape’s name is displayed on the graphical diagram.
To adjust the initial angle of the jib
-
Drag the handle located at the end on the jib’s shape either clockwise or counter-clockwise to specify the initial angle of the jib. To prevent changing the current length of the jib in the process, press and hold the Shift key while dragging the handle.
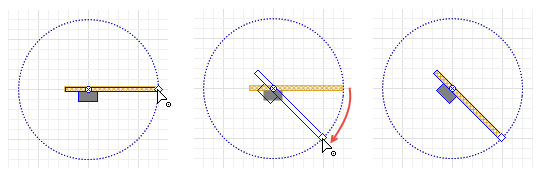
- As you move the handle, the actual jib angle will be displayed in the AnyLogic status bar.
To adjust the length of the jib
-
Drag the handle along the jib’s shape to change the length of the jib. To prevent changing the initial angle of the jib in the process, press and hold the Ctrl key while dragging the handle.
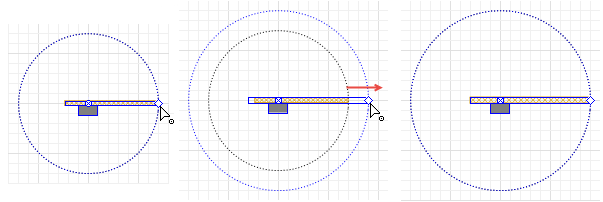
- As you move the handle, the actual jib length will be displayed in the AnyLogic status bar.
To adjust the crane’s blocked zone
- To enable the crane’s blocked zone, select Blocked zone option in the crane’s Properties view. In the graphic editor it will be displayed as a blue-colored sector of the crane’s circle shape. The sector will have two handles for adjustment.
-
Drag the blue handle either clockwise or counter-clockwise to specify where the angle where the blocked zone of the crane should start.
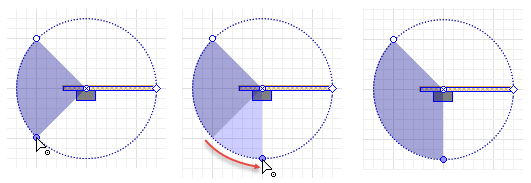
- To prevent changing current size of the blocked zone, press and hold Ctrl button while dragging the blue handle.
-
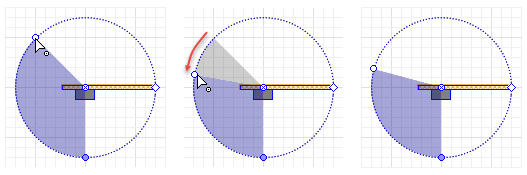
Drag the white handle to adjust the size of the blocked zone.
-
If you want to increase or decrease the blocked zone by changing both start and end angles in equal measure, press and hold Shift key while dragging either handle.
You can dynamically modify crane properties at model runtime using the following API.
- Working state
-
Function Description boolean isReady() Returns true if the crane is ready to operate, otherwise returns false. boolean isFailed() Returns true if the crane failed (broke down) and is not operating, otherwise returns false. boolean isLoaded() Returns true, if the crane is currently loaded with an material item. Otherwise, this function returns false. void fail() Initiates the crane’s failure. The crane stops working. void repair() Repairs the crane. The crane becomes available again. JibCraneState getState() Returns the current state of the crane. Valid values are: - JibCraneState.IDLE — The crane does not have any tasks and is not seized by any agent.
- JibCraneState.WAITING — The crane is seized by the agent, but this agent is currently moving through any blocks that are not SeizeCrane, MoveByCrane, or ReleaseCrane blocks. Also includes cases where the crane in manual mode remains at target, executes a programmed delay command, or has finished the program and waits for the next command.
- JibCraneState.MOVING_UNLOADED — The jib of the crane is moving without an agent, except moving to the parking position after being released. This state covers moving the crane without an agent in manual mode and moving to the agent including cases where the crane has to give way to other cranes with higher priority in process.
- JibCraneState.MOVING_HOME — The jib of the crane is moving to the parking position in automatic mode.
- JibCraneState.MOVING_LOADED — The jib of the crane is carrying an agent including cases where the crane has to give way to other cranes with higher priority. The state where the crane has agent animation attached to it also counts.
- JibCraneState.LOADING — The crane is being loaded with the agent inside the MoveByCrane block.
- JibCraneState.UNLOADING — The crane is being unloaded inside the MoveByCrane block.
- JibCraneState.FAILED — Failure caused by the Downtime block of the Failure / repair type or the call of fail() function.
- JibCraneState.MAINTENANCE — Maintenance caused by the Downtime block of the Maintenance type.
- JibCraneState.CUSTOM_DOWNTIME — The crane is in the Custom downtime.
- Utilization statistics
-
Function Description double getUtilization() Returns the crane utilization: the fraction of the time the crane was busy. The returned crane utilization value lies in the range [0..1]. void resetStats() Resets the crane utilization statistics. - Failure and repair statistics
-
Function Description double mttr() Returns MTTR (Mean Time to Repair), in model time units. MTTR is the average time required to repair an equipment after a failure occurs. The value is calculated for all Downtime blocks. double mttr(TimeUnits units) Returns MTTR (Mean Time to Repair), in the specified time units. MTTR is the average time required to repair an equipment after a failure occurs. The value is calculated for all Downtime blocks.
units — a constant defining the time unitsdouble mttr(Downtime downtime) Returns MTTR (Mean Time to Repair) for the given Downtime block, in model time units. MTTR is the average time required to repair an equipment after a failure occurs.
downtime — Downtime block
double mttr(Downtime downtime, TimeUnits units) Returns MTTR (Mean Time to Repair) for the given Downtime block, in the specified time units. MTTR is the average time required to repair an equipment after a failure occurs.
downtime — Downtime block
units — a constant defining the time unitsdouble mtbf() Returns MTBF (Mean Time Between Failures), in model time units. MTBF is the average time between failures of a piece of equipment. MTBF starts counting when the Failure downtime task is triggered. The time spent in the IDLE or FAILED state is not included. The value is calculated for all Downtime blocks. double mtbf(TimeUnits units) Returns MTBF (Mean Time Between Failures), in the specified time units. MTBF is the average time between failures of a piece of equipment. MTBF starts counting when the Failure downtime task is triggered. The time spent in the IDLE or FAILED state is not included. The value is calculated for all Downtime blocks.
units — a constant defining the time unitsdouble mtbf(Downtime downtime) Returns MTBF (Mean Time Between Failures) for the given Downtime block, in model time units. MTBF is the average time between failures of a piece of equipment. MTBF starts counting when the Failure downtime task is triggered. The time spent in the IDLE or FAILED state is not included.
downtime — Downtime blockdouble mtbf(Downtime downtime, TimeUnits units) Returns MTBF (Mean Time Between Failures) for the given Downtime block, in the specified time units. MTBF is the average time between failures of a piece of equipment. MTBF starts counting when the Failure downtime task is triggered. The time spent in the IDLE or FAILED state is not included.
downtime — Downtime block
units — a constant defining the time units - Level
-
Function Description Level getLevel() Returns the level where this crane is located. - Obstacle
-
Function Description boolean isObstacle() Returns true if this crane is considered an obstacle by pedestrians and transporters moving in free space mode. Otherwise, returns false. void setObstacle(boolean isObstacle) Sets this crane as an obstacle for pedestrians and transporters moving in free space mode.
isObstacle — if true, the crane is set as an obstacle. Otherwise, not. - Movement
-
Function Description JibCraneMovementMode getMovementMode() Returns the mode for the movement of the crane’s trolley, jib, and hook in relation to each other.
Valid values:
JIB_CRANE_MOVEMENT_STEP_BY_STEP
JIB_CRANE_MOVEMENT_CONCURRENTvoid setMovementMode(JibCraneMovementMode movementMode) Sets the mode for the movement of crane’s trolley, jib, and hook in relation to each other.
movementMode — components movement mode.
Valid values:
JIB_CRANE_MOVEMENT_STEP_BY_STEP
JIB_CRANE_MOVEMENT_CONCURRENTdouble trolleySpeed(Agent agent, SpeedUnits units) Returns the speed of the crane’s trolley, which set in the crane’s properties, in the specified speed units.
agent — a material item transferred by the crane.
units — a constant defining the speed units.double liftingSpeed(Agent agent, SpeedUnits units) Returns the speed of the hoisting winch operation, which is set in the crane’s properties, in the specified speed units.
agent — a material item transferred by the crane.
units — a constant defining the speed units.double rotationSpeed(Agent agent, RotationSpeedUnits units) Returns the speed of the crane’s jib rotation, which is set in the crane’s properties, in the specified rotation speed units.
agent — a material item transferred by the crane.
units — a constant defining the rotation speed units.Position getCurrentHookPosition() Returns current hook position in pixels with the crane’s jib angle as Position.rotation. Position getAbsoluteHookPosition() Returns the current hook position relative to the origin of coordinates of the agent, where the crane is located. The position is returned in pixels with the crane's jib angle as Position.rotation. - Dimensions and components
-
Function Description double getCraneHeight(LengthUnits units) Returns the crane’s height in specified units.
units — a constant defining the length units.void setCraneHeight(double height, LengthUnits units) Sets the crane’s height in specified units.
height — a new height value.
units — a constant defining the length units.double getJibLength() Returns the crane’s jib length in pixels. double getJibLength(LengthUnits units) Returns the crane’s jib length in specified units.
units — a constant defining the length units.void setJibLength(double length, LengthUnits units) Sets the crane’s jib length in specified units.
length — a new length value.
units — a constant defining the length units.double getInitialJibAngle(AngleUnits units) Returns initial angle of the crane’s jib position.
units — a constant defining the angle units.void setInitialJibAngle(double angle, AngleUnits units) Sets initial angle of the crane’s jib position.
angle — a new angle value.
units — a constant defining the angle units. - Blocked zone
-
Function Description boolean isBlockedZoneEnabled() Returns true if the crane’s blocked zone is enabled, otherwise returns false. void setBlockedZoneEnabled(boolean blockedZoneEnabled) Enables or disables the blocked zone.
blockedZoneEnabled — If this parameter is true, blocked zone is enabled. If false, blocked zone is disabled.double getBlockedZoneStartAngle(AngleUnits units) Returns the angle where the crane’s blocked zone starts, in specified angular units.
units — a constant defining the angular unitsdouble getBlockedZoneAngle(AngleUnits units) Returns the delta angle of the crane’s blocked zone, in specified angular units.
units — a constant defining the angular unitsvoid setBlockedZoneStartAngle(double angle, AngleUnits units) Sets the angle where the crane’s blocked zone starts, in specified units.
angle — a new angle value
units — a constant defining the angular unitsvoid setBlockedZoneAngle(double angle, AngleUnits units) Sets the delta angle of the crane’s blocked zone, in specified units.
angle — a new angle value
units — a constant defining the angular unitsvoid setBlockedZone(double startAngle, double deltaAngle, AngleUnits units) Enables blocked zone with specified parameters.
startAngle — a start angle of blocked zone value, in specified units
deltaAngle — a delta angle of blocked zone value, in specified units
units — a constant defining the angular units - Crane type
-
Function Description JibCraneType getType() Returns the type of the crane’s appearance.
Valid values:
JIB_CRANE_INDUSTRIAL
JIB_CRANE_CAT_HEAD
JIB_CRANE_FLAT_TOPvoid setType(JibCraneType type) Sets the type of the crane’s appearance.
type — new type of the crane’s appearance.
Valid values:
JIB_CRANE_INDUSTRIAL
JIB_CRANE_CAT_HEAD
JIB_CRANE_FLAT_TOP - Color
-
Function Description Color getColor() Returns the color of the crane, or null if the crane has no color. void setColor(Color color) Sets the color of the crane.
color — the new color/Color getTrolleyColor() Returns the color of the crane’s cabin, or null if the crane’s cabin has no color. void setTrolleyColor(Color trolleyColor) Sets the color of the crane’s cabin.
cabinColor — the new color. - Visibility
-
Function Description boolean isVisible() Returns true if the crane is visible; returns false otherwise. void setVisible(boolean v) Sets the visibility of the crane.
v — visibility. If v is true — the crane is set to be visible, if it is false — not visible. - Position
-
Function Description double getX() Returns the X coordinate of the center point of the crane. double getY() Returns the Y coordinate of the center point of the crane. double getZ() Returns the Z coordinate of the center point of the crane. Point getXYZ(Point out) Returns the (X, Y, Z) coordinates of the center point of the given crane.
out — the output Point object to write the result to. The object may be null.void setX(double x) Sets the X-coordinate of the crane.
x — a new X-coordinatevoid setY(double y) Sets the Y-coordinate of the crane.
y — a new Y-coordinatevoid setZ(double z) Sets the Z-coordinate of the crane (relative to the crane’s level).
z — a new relative Z-coordinatevoid setXYZ(Point point) Places the crane to the location of the given point.
point — object storing the (X, Y, Z) location - Removal
-
Function Description void remove() Removes the crane from the presentation. If the crane is not a part of presentation, the function does nothing. Removal from the presentation does not necessarily mean removing from the model logic, since logical networks and routes may have been created before the removal and survive it.
-
How can we improve this article?
-