

Nodes and paths are space markup elements that define the locations of agents in the space:
- The node defines a location where agents can reside.
- The path defines a movement path for agents.
Nodes can be connected to paths. Together they form a network.
The Rectangular node defines a node with a rectangular shape.
There are two other shapes of node available:
 Point node. Use this to draw a transit transportation node.
Point node. Use this to draw a transit transportation node. Polygonal node. Use this to draw an area of complex shape.
Polygonal node. Use this to draw an area of complex shape.
You can use attractors to define specific wait points inside the node.
Available only in Professional and University Researcher editions.
You can set the access to and speed through the node for pedestrians, transporters with free-space navigation, and path-guided navigation. Speed and access restrictions are not interdependent and can be specified separately. Nodes with different restrictions can overlap. Each node can have only one type of access restriction enabled.
Demo model: Areas with Limited Access for Transporters Open the model page in AnyLogic Cloud. There you can run the model or download it (by clicking Model source files). Demo model: Areas with Limited Access for TransportersOpen the model in your AnyLogic desktop installation. Demo model: Areas with Restrictions for Pedestrians Open the model page in AnyLogic Cloud. There you can run the model or download it (by clicking Model source files). Demo model: Areas with Restrictions for PedestriansOpen the model in your AnyLogic desktop installation.Nodes with enabled access restriction automatically change their color to red:
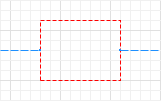
This color change does not occur if the node with restrictions is created from code.
- actions that must be executed on enter / exit path,
- actions that must be executed on enter / exit node.
By default, AnyLogic does not keep track of interactions between agents and nodes without access restrictions. If you call a function that should return a list of agents inside the node, such function will return an empty list. To get information about agents inside a particular node, you should first enable access restrictions on that node. For information about pedestrians, use the functions from the Agents section of the node’s API. Similar functions for transporters can be found in the Transporters section.
To add a rectangular node
- Drag the
 Rectangular node element from the
Rectangular node element from the  Space Markup palette onto the graphical diagram.
Space Markup palette onto the graphical diagram. - You can now resize the shape now and change its location or properties.
You can make your rectangular node simulate an inclined plane by defining the slope for this node. The slope will be applied to pedestrian movement only.
Demo model: Sloped Area Open the model page in AnyLogic Cloud. There you can run the model or download it (by clicking Model source files). Demo model: Sloped AreaOpen the model in your AnyLogic desktop installation.This way you can simulate stairs in your pedestrian models, as in the following demo model.
Demo model: Stairs Open the model page in AnyLogic Cloud. There you can run the model or download it (by clicking Model source files). Demo model: StairsOpen the model in your AnyLogic desktop installation.To define a slope for the node
-
To make the node sloped, select the Slope for pedestrians option in the node’s Position and size section of the Properties view.
The slope line will appear inside the node in the graphical editor: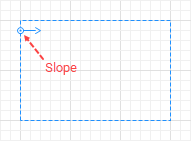
- In the graphical editor, adjust the slope line’s direction. The line should point exactly in the Z-coordinates growth direction.
- Click the node and tune it to define the required slope.
- If you know the angle value, leave the Define slope as: angle option selected and specify the angle value in the Vertical angle control below.
- Otherwise, if you know the height between the levels, but not the angle, choose guiding line in the node’s Define slope as property. In the dZ property below, enter the height between the levels, in pixels. Then direct the slope line in the graphical editor so that in XY plane it lies parallel to the incline direction.
- General
-
Name — The name of the node. The name is used to identify and access the node from code.
Ignore — If selected, the node is excluded from the model.
Visible on upper agent — If selected, the node is also visible on the upper agent where this agent lives.
Lock — If selected, the node shape is locked. Locked elements do not respond to mouse clicks, and they cannot be selected in the graphical editor until you unlock them. This is often needed when you want to prevent the element from being edited while other elements are placed over it.
Visible — Here you specify whether the shape is visible on animation at model runtime, or not. Using the control, choose yes or no.
Locations layout — [Visible if there are no attractors inside the node] Here you can choose the layout inside the node: Random or Arranged.
Attractors… — Click this button to create attractors inside the area. Attractors are the places where the pedestrians will tend to get.
- Speed and access restrictions
-
Restrictions apply to — Specify the agent type whose speed and/or access will be restricted in this node.
Speed restriction — If selected, limits the speed of agents in this node.
Maximum speed — [Visible if the Speed restriction option is selected] The maximum speed allowed for agents in this node.
Access restriction — If selected, restricts the access of agents to this node.
Access restricted by — [Visible if the Access restriction option is selected] Defines the access restriction policy for this node. The following options are available:
- capacity — the number of agents inside the node. As long as the number of agents is less than or equal to the value specified in the Capacity parameter, the access to the node is granted.
- throughput — the number of agents that can enter the node per 1 model time unit. As long as the number of agents is less than or equal to the value specified in the Throughput parameter, the access to the node is granted.
- schedule — the access is controlled by the on/off Schedule. The node is closed when the schedule is “on” and open when the schedule is “off”.
- condition — a Condition is evaluated for each agent that wants to enter the node. If the evaluation returns true, the access is denied. If the evaluation returns false, the access is granted.
- call of close() function — the node is closed by the explicit call of the close() function. To open the node, you can call the open() function.
Capacity — [Visible if Access restricted by: capacity] The maximum number of agents allowed in the node. If this value is exceeded, the access to the node is restricted.
Throughput — [Visible if Access restricted by: throughput] The maximum number of agents allowed in the node per 1 model time unit. If this value is exceeded, the access to the node is restricted.
Schedule — [Visible if Access restricted by: schedule] A schedule that governs the access to the node. When “on”, the access to the node is restricted for the specified agent type. When “off”, any agent can enter the node.
Condition — [Visible if Access restricted by: condition] A Boolean expression that must be evaluated for each agent to determine whether the access to the node can be granted. If the evaluation returns true, the access is restricted; otherwise, the node remains open.
Area is avoided if closed — [Visible if Access restricted by: schedule / condition / call of close() function] If this option is selected, the transporters will avoid the node when it is closed.
On enter — [Visible if the Access restriction option is selected] The code that will be executed when the agent enters the node.
On enter denied — [Visible if the Access restriction option is selected] The code that will be executed when the agent tried to enter the node, was prohibited and put in the queue. This code will be executed only on the agent’s first denial of entry. If the same agent tries to enter and is denied again, the code placed here will not be executed.
On exit — [Visible if the Access restriction option is selected] The code that will be executed when the agent exits the node.
On open — [Visible if the Access restriction option is selected; cannot be applied if Access restricted by: condition] The code that will be executed when the node is opened.
On close — [Visible if the Access restriction option is selected; cannot be applied if Access restricted by: condition] The code that will be executed when the node is closed.
- Appearance
-
Fill color — The fill color of the shape. Select No color, if you do not want shape to be filled.
Line color — The color of the outline. Select No color, if you do not want the outline to be drawn.
Line width — The width of the outline.
Line style — [Enabled only if the Show in: 3D only checkbox is not selected] The outline style. Select whether you want solid, dashed, or dotted outline to be drawn.
- Position and size
-
Level — The level to which this element belongs.
Rotation — The rotation angle of the node in the XY plane.
X — The X-coordinate of the area’s start point.
Y — The Y-coordinate of the area’s start point.
Z — [Enabled if Show in: 3D only option is selected] The Z-coordinate of the area, in meters. The value is relative to the Z-coordinate of the area’s level.
Width — The width of the node (in pixels).
Height — The height of the node (in pixels).
Slope for pedestrians — If selected, the node defines an inclined plane. The slope will be applied to pedestrian movement only.
Define slope as — [Visible if the Slope for pedestrians option is selected] Choose here, whether you want to define a slope just by specifying the angle value, or with a guiding line, if you do not know the area slope angle, but know the area height.
Slope X — [Visible if the Slope for pedestrians option is selected] X-coordinate of the slope line’s start point.
Slope Y — [Visible if the Slope for pedestrians option is selected] Y-coordinate of the slope line’s start point.
Vertical angle — [Visible if the Define slope as: angle option is selected] The slope angle.
Horizontal orientation — [Visible if the Define slope as: angle option is selected] Slope line’s rotation angle in XY plane.
dZ — [Visible if the Define slope as: guiding line option is selected] The height between the levels, in pixels.
dX — [Visible if the Define slope as: guiding line option is selected] X-offset of the slope’s end point regarding the start point of the slope line.
dY — [Visible if the Define slope as: guiding line option is selected] Y-offset of the slope’s end point regarding the start point of the slope line.
- Advanced
-
Show in — Here you can choose whether you want the shape to be shown both In 2D and 3D animation, or in 2D only, or in 3D only.
Show name — If selected, the shape’s name is displayed on the graphical diagram.
You can dynamically modify shape properties at model runtime using the following API.
- Speed and access restriction
-
Function Description void restrictAccessByCapacity(int number) Restricts access to the node by the specified capacity. This function can be used to change the number of agents dynamically, but cannot be used after initialization to change the type of restriction in the already existing node.number — the maximum number of agents that can be inside the node before the access to the node is restricted.void restrictAccessByThroughput(double throughput, RateUnits units) Restricts access to the node by the specified throughput, that is, the maximum permissible number of agents entering the node during 1 specified rate unit. This function can be used to change the number of agents dynamically, but cannot be used after initialization to change the type of restriction in the already existing node.throughput — maximum permissible number of agents entering the node during 1 specified rate unit.
units — a constant defining the rate units.restrictAccessBySchedule(Schedule<Boolean> schedule) Restricts access to the node by the specified “on/off” schedule. This function can be used to change the schedule dynamically, but cannot be used after initialization to change the type of restriction in the already existing node.schedule — the “on/off” schedule that controls access to the node. During the “on” periods, agents can enter the node, while during the “off” periods, the access to the node is closed.void restrictAccessManually(boolean initiallyClosed) Enables manual control over access to the node. Do not use this function to open or close the access to the node dynamically after initialization. Use open(), close(), or setOpen() functions instead.initiallyClosed — if true, the access to the node is closed initially, if false — the entrance to the node is open initially.boolean isAccessRestricted() Returns true if the access to the node is restricted. Otherwise returns false. void recalculateAccessibility() Recalculates the accessibility of the node. This function can only be used if Access restricted by: condition. boolean isOpen() Returns true if the node is open. Otherwise returns false.
This function cannot be used if Access restricted by: condition. In this case the area does not have an open / closed state and the function always returns true.void open() Lifts access restrictions from the node. This function can only be used if Access restricted by: call of close() function or if the access to this node is controlled by the call of the restrictAccessManually() function. void close() Restricts access to the node. This function can only be used if Access restricted by: call of close() function or if the access to this node is controlled by the call of the restrictAccessManually() function. void setOpen(boolean open) Controls the access to the node.
This function can only be used if Access restricted by: call of close() function or if the access to this node is controlled by the call of the restrictAccessManually() function.
open — if true, the node is open to all agents; if false, the access to the node is restricted.AreaAccessRestrictionType getAccessRestrictionType() Returns the access restriction type of the node.
Valid values:
AREA_ACCESS_RESTRICTION_BY_CAPACITY — access is restricted by specified capacity.
AREA_ACCESS_RESTRICTION_BY_THROUGHPUT — access is restricted by specified throughput.
AREA_ACCESS_RESTRICTION_BY_SCHEDULE — access is restricted by specified schedule.
AREA_ACCESS_RESTRICTION_BY_CONDITION — access is restricted by specified condition.
AREA_ACCESS_RESTRICTION_MANUAL — access is restricted by the call of close() function.boolean isAvoidedIfClosed() Returns true, if the state of the node is taken into account at transporter route calculation. Otherwise, returns false. void setAvoidedIfClosed(boolean avoided) Determines whether the state of the node is taken into account at transporter route calculation.
avoided — if true, the transporters will avoid the closed node; if false — they won’t.Agent getRestrictedAgentClass() Returns the type of agent whose speed and/or access is restricted for this node. void setRestrictedAgentClass(Agent restrictedClass) Sets the type of agent whose speed and/or access is restricted for this node.
restrictedClass — agent type, for example, Agent.class.boolean isSpeedRestricted() Checks whether this node has speed restriction enabled. If the function returns true, the speed is restricted. Otherwise, the function returns false. double getMaxSpeed(SpeedUnits units) Returns the maximum permissible speed in the node in specified speed units.
units — a constant defining the speed units.void restrictSpeed(double maxSpeed, SpeedUnits units) Restricts the speed inside the node to the specified value maxSpeed in the specified speed units.
maxSpeed — maximum permissible speed value.
units — a constant defining the speed units.int getCapacity() Returns the maximum number of agents that can be inside the node before the access to the node is restricted. double getThroughput(RateUnits units) Returns the maximum permissible number of agents that can enter the node during 1 specified rate unit.
units — a constant defining the rate units.Schedule<Boolean> getSchedule() Returns the “on/off” schedule that controls access to the node. boolean accessRestrictionCondition(T agent) Evaluates the access condition for the specified agent. If the evaluation returns true, access is restricted; otherwise, returns false.
agent — the agent for whom the access condition is evaluated. - Agents
-
In order to use the functions listed in this section, you should enable the access restrictions in the corresponding node. Otherwise, these functions will return nothing.
If you model has pedestrians and transporters moving through the same nodes, these functions will return both. For example, if there are 5 transporters and 3 pedestrians inside the node, getNumberOfAdmittedAgents() will return 8.
In the context of these functions, “agents” means transporters and pedestrians only. You cannot use these functions to work with any other agent types.Function Description List<T> agents() Returns the list of agents (transporters and pedestrians only) currently present inside the node. List<T> getAgentsWaitingToEnter() Returns the list of agents (transporters and pedestrians only) currently waiting at the border of the node with enabled restriction for permission to enter. int getNumberOfAdmittedAgents() Returns the number of agents (transporters and pedestrians only) admitted to the node with enabled restriction. boolean contains(Agent agent) Returns true if the node contains the given agent (transporter or pedestrian only). Otherwise returns false.
agent — the given agentdouble density(AreaUnits units) Returns the average density of agents (transporters and pedestrians only) inside the node measured in agents per given area units. The density is averaged over the area, time averaging is not applied.
units — a constant defining the area units. - Transporters
-
In order to use the functions listed in this section, you should enable the access restrictions in the corresponding node. Otherwise, these functions will return nothing.
These functions are applicable only to transporters.Function Description List<T> getAdmittedTransporters() Returns the list of transporters currently present inside the node. If the node does not have restrictions enabled, returns an empty list. int getNumberOfAdmittedTransporters() Returns the number of transporters currently present inside the node. If the node does not have restrictions enabled, returns nothing. int getNumberOfTransporters() Returns the number of transporters with path-guided navigation type currently present inside the node. This function only works for nodes that are part of a network. It doesn't depend on the enabled restrictions. - Position
-
Function Description double getX() Returns the X coordinate of the node (namely, the coordinate of its upper left corner). double getY() Returns the Y coordinate of the node (namely, the coordinate of its upper left corner). double getZ() Returns the Z coordinate of the node (namely, the coordinate of its upper left corner). double getZ(double x, double y) Returns the Z coordinate of the given point.
x — the X coordinate of the point.
y — the Y coordinate of the point.void setPos(double x, double y, double z) Sets the new coordinates for the node.
x — the new value of the X coordinate.
y — the new value of the Y coordinate.
z — the new value of the Z coordinate.Point getCenter() Returns the coordinates of the node center. - Level
-
Function Description Level getLevel() Returns the level on which this node is located. - Size
-
Function Description double getWidth() Returns the width of the node (in pixels). double getHeight() Returns the height of the node (in pixels). void setSize(double width, double height) Sets the width and height of the node.
width — the new width of the node (in pixels).
height — the new height of the node (in pixels). - Rotation
-
Function Description double getRotation() Returns the rotation of the node in radians (in the clockwise direction). void setRotation(double rotation) Sets the rotation of the node.
rotation — the new value of rotation in radians (in the clockwise direction). - Visibility
-
Function Description boolean isVisible() Returns true if the node is visible; returns false otherwise. void setVisible(boolean v) Sets the visibility of the node.
v — visibility. If v is true — the node is set to be visible, if it is false — not visible. - Fill color
-
Function Description Color getFillColor() Returns the fill color of the node, or null if the node has no fill color or has textured fill (in this case use getTexture() to get the node’s texture). Texture getFillTexture() Returns the fill texture of the node or null if the node has no fill texture or has color fill (in this case use getFillColor() to get the node’s fill color). void setFillColor(Color fillColor) Sets the fill color of the node.
fillColor — the new fill color, if null, the node is not filled.void setFillColor(Paint fillColor) Sets the fill color (or Texture) of the node.
fillColor — the new fill color, if null, the node is not filled. - Outline
-
Function Description Color getLineColor() Returns the line color of the node, or null if node has no line color or has textured line (in this case use getLineTexture() to get the line’s texture). Texture getLineTexture() Returns the outline texture of the node or null if node has no outline texture or has colored line (in this case use getLineColor() to get the line’s color). void setLineColor(Color lineColor) Sets the line color of the node.
lineColor — the new line color, if null, the node line is not drawn.void setLineColor(Object lineColor) Sets the line color (or Texture) of the node.
lineColor — the new line color, if null, the node line is not drawn.double getLineWidth() Returns the width of the node outline. void setLineWidth(double width) Sets the width of the node outline; 0 means the thinnest possible outline.
width — the new width of the node outline.int getLineStyle() Returns the style of the node outline.
Valid values:
LINE_STYLE_SOLID
LINE_STYLE_DOTTED
LINE_STYLE_DASHEDvoid setLineStyle(int style) Sets the style of the node outline.
Line style not applied in 3D animation; the only supported line style in 3D is solid.
style — the new style of the node outline.
Valid values:
LINE_STYLE_SOLID
LINE_STYLE_DOTTED
LINE_STYLE_DASHED - Attractors
-
Function Description List<Attractor> getAttractors() Returns a collection of attractors inside the node. void addAttractor(double x, double y, double orientation) Creates a new attractor and adds it inside the node.
x — absolute X-coordinate of the attractor
y — absolute Y-coordinate of the attractor
orientation — orientation of the attractor, measured clockwise in radians - Network
-
Function Description Network getNetwork() Returns the network this markup element belongs to or null if this element is not a part of a network. int getConnectionsCount() Returns the number of the node’s connections with other nodes. Path getConnection(int index) Returns the connection between this node and another node by the provided index.
index — the index of required connection in range (0, this.getConnectionsCount() - 1). - Slope
-
Function Description Slope getSlope() Returns the slope of this node. void setSlope(Slope slope) Sets the new slope for the node.
slope — the new slope shape - Advanced
-
Function Description boolean contains(double px, double py) Returns true if the node contains the point with the given coordinates; returns false otherwise.
px — the x coordinate of the point relative to this node’s container.
py — the y coordinate of the point relative to this node’s container.double getNearestPoint(double px, double py, Point output) Calculates the point in this node nearest to the given (X, Y) point and writes the result into the output object.
Returns the square of distance to the point (in the XY-projection). All calculations are performed in the horizontal projection (z-coordinates are not used, as if all of the Z coordinates were zero).
px — the X coordinate of the point.
py — the Y coordinate of the point.
output — the output object to write result to. Note that output.z is left unchanged.double getNearestPoint(double px, double py, double pz, Point output) Calculates the point in this node nearest to the given (X, Y, Z) point and writes the result into the output object.
Returns the square of distance to the point.
px — the X coordinate of the point.
py — the Y coordinate of the point.
pz — the Z coordinate of the point.
output — the output object to write result to. Note that output.z is left unchanged. - Removal
-
Function Description void remove() Removes the node from the presentation. If the node is not a part of presentation, the function does nothing. Removal from the presentation does not necessarily mean removing from the model logic, since logical networks and routes may have been created before the removal and survive it.
-
How can we improve this article?
-